Asenkron motorlar
3 fazlı motorların çalışma prensibini anlatırken sincap kafesli rotorlu(kısa devre rotorlu) motorlar için ele alacağız. Yol verme yöntemlerini ise asenkron motorlarda hem sincap kafesli rotorlar hem de tel sargılı rotorlar için genel olarak ele alacağız.
1- Asenkron motorların çalışma prensibi
• Stator 3 fazlı gerilimle beslenir ve sargılardan 3 fazlı simetrik akım geçer.
• 3 fazlı akım döner bir manyetik alanın oluşumunu sağlar.
• Manyetik alan senkron hızda döner. Alanın dönme hızı (ns) (burada ns ve nr deki s ve r’ler alt indistir) şebeke frekansı (f) ve kutup sayısı (p) ile kontrol edilir.
• ns = f / p/2 = 2*f / p (1 saniyedeki devir sayısı)
• ns = f / p/2 = (2*f*60)/p (1 dakikadaki devir sayısı)
• Döner alan kısa devre edilmiş rotor iletkenlerinde gerilim meydana getirir.
• Elde edilen gerilim çubuklardan akım akmasına neden olur.
• Stator manyetik alanı ve rotor akımı arasındaki etkileşim motoru (rotoru) çeviren kuvveti üretir.
Kuvvet oluşumu
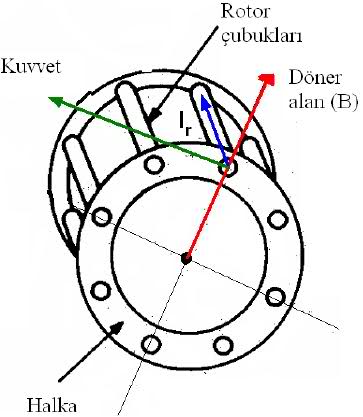
• Döner alan çubuklarda akım oluşturur.
• Oluşan kuvvet motoru döndürür.
• (Kuvvet = F = B I L sin φ)
Burada B: manyetik alan şiddeti
I: akım
φ: frekans
L: rotorun uzunluğudur.
• Elde edilen gerilimin genliği döner alanın ve rotorun dönüş hızının farkına bağlıdır.
• Hız farkı rotorun durma konumunda yüksek akım çektiği durumda maksimum olur. Bu durumda rotor akımının frekansı 50 Hz’dir.
• Demeraj(elektirikli makinenin ilk çalışmaya başlaması) sonrası rotor hızlandıkça aradaki fark azalır ve sonuçta:
– Rotorda endüklenen gerilimin frekansı azalır.
– Rotor akımının ve endüklenen gerilimin genliği azalır.
• Rotor hızıstatorun açısal döner açısal hızına eşit olduğunda oluşan gerilim, akım ve moment (tork) değerleri sıfır olur. Motor (rotor) hızı senkron açısal hızdan düşük olmalıdır.
• Hız farkına kayma (s) adı verilir.
S = (ns – nr) / ns olup ns = 2 f / p (devir/saniye)
• Rotor akımının frekansı: fr = S*f
• Nominal çalışma şartları altında kayma 1% ile 5 % arasında gerçekleşir.
2- Asenkron motorlara Yol Verme Yöntemleri
Asenkron motorların kalkınma (kalkış-yol alma) akımlarını azaltmak için aşağıdaki yol verme yöntemleri uygulanır.
2.1- Doğrudan Yol Verme (Direkt yol verme)
2.2- Düşük Gerilimle Yol Verme
2.2.1- yıldız-üçgen yol verme
2.2.2- ototransformatör yol verme
2.2.3- dirençle yol verme
2.2.4- Rotoru Sargılı Asenkron Motorlara Yol Verme
2.3- Mikroİşlemcilerle Yol Verme
2.3.1- Yumuşak Yol Verme: (Softstarter ile Yol verme)
2.3.2- Frekans değiştirici (Sürücü) ile Yol Verme
2.1- Doğrudan Yol Verme (Direkt Yol Verme)
Asenkron motorlar, kalkış sırasında şebekeden 3-6 katı kadar fazla akım çeker. Kalkış sırasında çekilen bu fazla akımın süresi kısadır. Küçük güçlü motorlarda, kısa süreli fazla akımın,şebeke üzerinde olumsuz etkisi olmaz. Ancak büyük güçlü motorlarda, kalkış akımının etkisi önemlidir. Şebekelerin durumuna göre elektrik idareleri, belli güçlerden büyük motorların çalıştırılmasında kalkış akımını düşürücü önlemler alınması için kurallar getirmiştir.
Bir fazlı motorlar, küçük güçlü motorlar olduğundan bu motorlara ve yine 3-4 kW’ye
kadar küçük güçlü üç fazlı asenkron motorlara doğrudan yol verilir.
Motorlara yol verme işleminde, paket veya kollu tip mekanikşalterler veya kontaktör
kombinasyonu ile oluşturulan manyetikşalterler kullanılır.
2.2- Düşük Gerilimle Yol Verme
Bu yöntem ilk çalışmaya başlama, boşta çalışan motorlarda uygulanır. Yük altındaki kalkınan motora uygulanmaz. Çünkü motora düşük gerilim verildiğinde döndürme momintide azalır. Yükü karşılayibilmek için motorşebekeden daha fazla akım çeker ve kalkınmaz.
Üç fazlı asenkron motorlara uygulanan yol verme yöntemlerinden en çok kullanılanı, düşük gerilimle yol vermedir. Ancak bu yöntem yalnızca boşta kalkınan motorlara uygulanır. Zira yüklü kalkınan bir motora kalkınma anında düşük gerilim uygulandığında motor, yükü karşılamak için şebekeden daha da fazla akım çeker ve kalkınamaz. Halbuki düşük gerilimle yol vermenin amacı kalkış akımını azaltmak olduğundan, yüklü kalkınan motorlara düşük gerilim yöntemi ile yol verilemez.
2.2.1- Yıldız-Üçgen Şalterle Yol Verme
Kalkış akımını düşürmede en ekonomik yöntemdir. Faz sargısının uçlarına nominal gerilimden √3 kat düşük gerilim tatbik edilir. Motor demarajı bitirince nominal gerilim uygulanır. Önce yıldız bağlanır, sonra otomatik olarak veya el ile üçgen bağlantıya geçilir. Başlangıç akımı ve momenti düşüktür. Üçgene geçildikten sonra tam yük verilir.
2.2.2- Ototransformatör İle Yol Verme
Üçgen çalışma gerilimi, şebeke gerilimine eşit olmayan motorlara λ/∆(yıldız-üçgen) yol verme yöntemi ile yol verilemez. Bu tip motorlara, oto trafosu veya kademeli direnç yöntemi ile yol verilir. Şebeke gerilimi özel transformatörlerle düşürülür. Motor ancak yüksüz olarak kalkabilir.
2.2.3- Direnç ile Yol Verme
Üç fazlı asenkron motorlara kademeli direnç ile yol vermede temel prensip,şebeke geriliminin bir kısmını yol verme direnci üzerinde düşürmek ve geriye kalan gerilimi motora uygulamaktır. Böylece motor ilk kalkınma anında aşırı akım çekmeden düşük gerilimle yol almış olur.
2.2.4- Rotoru Sargılı Asenkron Motorlara Yol Verme
Bilezikli asenkron motor da denen rotoru sargılı asenkron motorlar da sincap kafesli asenkron motorlarda olduğu gibi kalkınma anında aşırı akım çeker. Ancak rotoru sargılı asenkron motorlarda rotor sargı direnci, yol verme anında devresine direnç eklenerek artırılırsa, kalkınma anında motordan maksimum döndürme momenti elde edilir. Bu nedenle rotoru sarılı asenkron motorların yol alma karakteristikleri, sincap kafesli asenkron motorlara göre daha iyidir.
Yol verme anında rotor sargılarına direnç eklendiğinde motor, maksimum moment ve normal kalkınma akımı ile yol alır. Rotor devresine direnç eklenmemiş bir asenkron motor maksimum döndürme momentine senkron devrin %80’inde ulaşır. Eğer rotor sargı direnci % 20 artırılırsa motorun ilk hareketinde maksimum döndürme momenti elde edilir.
Bu nedenle rotor devresine yol verme sırasında bir veya birkaç kademe direnç eklenerek hem yol alma akımı azaltılmış olur hem de maksimum kalkınma momenti elde edilir. İlk anda rotor devresine, motorun gücüne uygun dirençler bağlanır. Motor yol aldıkça dirençler kademe kademe devreden çıkartılır ve sonunda rotor sargı uçları kısa devre edilir. Ayrıca eklenen dirençle değişik yüklerde motor devir sayısı ayarlanabilir.
2.3- Mikroİşlemcilerle Yol Verme
Bu yöntemle motorlara yol verme ilk kuruluşta pahalı olmasına rağmen motorların vuruntu olmadan yumuşak kalkış yapmaları ve motor devri geniş sınırlar içinde ayarlanmaları son zamanlarda tercih edilen yöntemlerin başında gelmektedir. Yapısı ve çalışma prensibi mikro işlemci temeline dayanan bu elemanlarşebeke ile motor arasına bağlanır. Motorun nasıl çalışacağı mikro işlemciye girilir. Motor istenen şekilde çalışır.
Benzer Yazılar
- Triyak ile AC Motor Hız Kontrol Devresi
- Senkron Makinalar ve Çalışma Prensibi
- 3 Fazlı Asenkron Motorlara Yol Verme
- Üç Fazlı Asenkron Motorlara Yol Verme
- Üç Fazlı Asenkron Motorların Çalışma Prensibi
- Asenkron Motor Nedir?
- Asenkron Makinelerin Yapısı
- ASENKRON MOTORLARIN YAPISI VE ÖZELLİKLERİ
- Senkron Makinelerde Frekans ve Hız
- Elektrik Motoru

