L298 motor sürücü entegresi genellikle L293D ve L293B gibi motor sürücü entegrelerin maksimum akım sınırlarını aşan motorların kontrolü için tercih edilen 15 bacaklı bir motor sürücü entegredir.
L298 motor sürücü entegre kullanımında voltaj sınırı 46 V, akım sınırı ise 2 A değerindedir.
L298 motor sürücü entegre de L293 motor sürücü entegreler gibi içerisinde 2 adet H köprüsü bulundurur ve iki motoru bağımsız ve çift yönlü olarak kontrol edebilir.
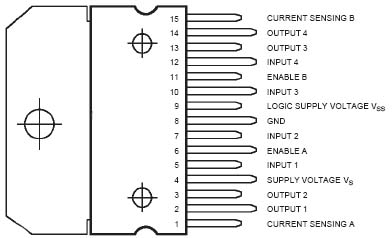
L298 Motor Sürücü Entegresi üzerinde bulunan pinlere ve bu pinlerin görevleri
- INPUT 1, 2, 3 ve 4 (5, 7, 10 ve 12. pinler): INPUT pinleri motorların dönme yönünün kontrolü için Arduino’ya bağlanır. INPUT 1 ve 2 pinleri 1. motorun, INPUT 3 ve 4 pinleri ise 2. motorun kontrolünde kullanılır. Örneğin 1. Motorun kontrolü için, INPUT 1 pini 5 volt, INPUT 2 pini 0 volt yapılır ise motor ileri yönde dönmeye başlar. Eğer INPUT 1 pini 0 volt ve INPUT 2 pini 5 volt yapılır ise motor geri yönde dönmeye başlar. İki pinin aynı anda 5 volt olması motoru kilitleyerek fren yapmasını sağlar. İki pininde 0 volt düzeyinde olması ise motorun boşta olmasına neden olup kısa süre sonra motorun durmasını sağlar.
- OUTPUT 1, 2, 3 ve 4 (2, 3, 13 ve 14. pinler): Bu pinler motorlara bağlanan pinlerdir. OUTPUT 1 ve 2. pinler 1. Motora, OUTPUT 3 ve 4. pinler ise 2. motora bağlanır.
- ENABLE A ve ENABLE B (6. ve 11. pinler): Bu iki pin motorların dönüş hızını ayarlamak için kullanılır. Bu yüzden bu pinleri Arduino’nun PWM ayaklarına bağlamamız gerekir. PWM sinyalinin görev zamanına göre motorun hızı arttırılabilir veya azaltılabilir. ENABLE A pini 1. motorun, ENABLE B pini ise 2. motorun hızını kontrol etmek için kullanılır. Eğer hız kontrolü yapılmayacak sa bu pinler 5 volt hattına bağlanabilir.
- VSS (LOGIC SUPPLY voltAGE – 9. pin): Adından da anlaşıldığı gibi bu pinin 5 volta bağlanması gerekmektedir. Devrenin kararsızlığını azaltmak için bu pinle toprak arasına 100nF’lık kondansatör bağlanabilir.
- GND (8. pin): Besleme hattının devreyi tamamlayabilmesi için bu pin toprak hattına bağlanması gerekir. Ayrıca entegrenin üzerindeki demir de GND pinine bağlıdır. Bu metalin devre kurulumunda yanlış pinlere değip kısa devre yapmamasına özen göstermek gerekir.
- VS (4. pin): Entegrenin motorlara vereceği enerjiyi aldığı ana besleme hattıdır. Bu hatta bağlanacak enerji kaynağı motorlara verileceği için, motorlarımızın özelliğine göre besleme gerilimi kullanmalıyız. Genellikle bu hatta 7 ila 12 volt arasında besleme kaynakları bağlanmaktadır.
Dikkat: PWM sinyali bir kare sinyaldir. Bu sinyalin 5 volt ve 0 volt düzeylerinin oranına görev zamanı denir. Görev zamanı çıkış sinyalinin genliğini belirlediği için motorların dönme hızını ayarlamada kullanılır. Motorlar için PWM sinyalini üretmek için Arduino’nun analogWrite fonksiyonunu kullanacağız.
L298N Motor Sürücü Devresi inceleyin .

