Mikroişlemci, bir bilgisayar sisteminde programların işletilmesinden sorumlu olan ve tüm bileşenleri merkezi şekilde kontrol eden entegre devredir.

Mikro işlemcinin temel işlevi, işlenen ve kullanılan verileri birimler arasında iletmek, iletilen verileri işlemek, verileri bir durumdan diğerine çevirmek ve verileri saklamak.
Mikroişlemci, işlemci ana işlem biriminin (CPU- Central Process Unit) fonksiyonlarını tek bir yarı iletken tümdevrede (IC-Integrated Circuit) birleştiren programlanabilir bir sayısal elektronik bileşendir. Kullanıcı ya da programcı tarafından yazılan programları meydana getiren komutları veya bilgileri yorumlamak ve yerine getirmek için gerekli olan tüm mantıksal devreleri kapsar.
Bu devreler genelde transistörlerden meydana gelmektedir.

Mikroişlemcinin Yapısı
Mikroişlemcilerin yapısında aşağıdaki birimler bulunmaktadır.
•ALU
•Zamanlama ve Kontrol Birimi
•Kaydediciler
ALU(Arithmetic Logic Unit – Aritmetik ve Mantık Birimi )
ALU mikroişlemcide aritmetik ve mantık işlemlerinin yapıldığı en önemli birimlerden birisidir.
Aritmetik işlemler denilince başta toplama, çıkarma, çarpma, bölme, mantık işlemleri denilince AND,OR, EXOR ve NOT gibi işlemler akla gelir. Komutlarla birlikte bu işlemleri mantık kapılarının oluşturduğu toplayıcılar, çıkarıcılar ve kaydıran kaydediciler gerçekleştirirler. ALU’da gerçekleşen bütün bu işlemler kontrol sinyalleri vasıtasıyla Zamanlama ve Kontrol Biriminin gözetiminde eş zamanlı olarak yapılır.
ALU’da basit matematik komutlar zorlanmadan işlenebilir fakat karmaşık aritmetik işlemleri (doğrudan bir komutla çarpma, bölme, karekök alma) gerçekleştirmek için ayrı altyordam gruplarına veya ek elektronik devrelere ihtiyaç duyulur. Eğer ek devre konulmamışsa mevcut devrelerle bu işlemleri gerçekleştirmek için birbiri ardına aynı komutu defalarca işlemek gereklidir, bu da zaman kaybı demektir. Gelişmiş mikroişlemcilerde bu devreler yerleşik vaziyettedir.
Gelişmiş işlemlerde kayan noktalı aritmetik işlemleri gerçekleştirmek üzere FPU (Floating Point Unit) bir işlemci daha yerleştirilmiştir. Bu sayede küçük haneli veya küçük kesirli sayılarla işlem yapılabilmektedir. Eğer sistemde FPU mevcutsa ağır matematiksel işlemler bu işlemci tarafından yapılırken ana işlemci diğer işlemlerle meşgul olacağından sistemde yavaşlama yok denecek kadar az olur.

Zamanlama ve Kontrol Birimi
Zamanlama ve kontrol birimi, bellekte program bölümünde bulunan komut kodunun alınıp getirilmesi, kodunun çözülmesi, ALU tarafından işlenilmesi ve sonucunun alınıp belleğe geri konulması için gerekli olan kontrol sinyalleri üretir. Bilgisayar sisteminde bulunan dahili ve harici bütün elemanlar bu kontrol sinyalleri ile denetlenir.
Basit bir mikroişlemcide bu bölüm 3 değişik işlevi yerine getirir:
1. Zamanlama Kontrolü: İşlemci, harici saat sinyali üreten bir birimden giriş alan iç saat devresine sahiptir. Bir sinyal alınarak talebe göre zaman sinyallerine çevrilerek sisteme dağıtılır.
2. Komut kod çözücüsü: Bu devre komut kaydedicisinde tutulan komutları yorumlar ve ALU’ya kaydedicilerle çalışması için uygun sinyaller gönderilir.
3. Kesme ve Mantık Birimi:Bu birim diğer kontrol elemanlarına benzer.Gerekli durumlarda kesme sinyallerini alarak işlemciyi uyarır.
Veri Yolu Bağdaştırma Birimi (BIU)
İşlenecek komutların kodları sistem tarafından bellekle ilgili segmentlerde ki adreslere yerleştirilir. Bellekteki bu komutlar çalıştırılacağı zaman doğrudan veri yolu bağdaştırma birimi tarafından bellekten alınarak kod çözme birimine getirilirler. Ayrıca icra edilen bir komutun sonucu belleğe yazılacağı zaman veri yolu bağdaştırma biriminden geriye yazma talep edilir.
İcra biriminin komutlarıyla verinin alınıp getirilmesi veya belleğe depolanması sırasında veri bağdaştırma birimi otomatik olarak getirilen verilerdeki komutları adına tampon da denilen işlemcinin tipine göre kapasitesi değişen komut kuyruğuna yerleştirir. Bellekten alınıp getirilecek ve işlenecek bu komutların yeri CS:IP kaydedici ikilisi tarafından belirlenir. Bellekte işlenecek programın ilk komutunun bulunduğu adres bu birim tarafından otomatik olarak CS:IP kaydedicilerine yerleştirilir.
Bellekten veya I/O birimlerinden her ne yöntemle olursa olsun bir şekilde komut kuyruğuna getirilen komut kodları ve operand bilgileri icra birimi tarafından işlenmek için hazır durumdadır.

İcra Birimi (EU)
Bu birim, BIU ile birlikte paralel çalışarak komut kuyruğuna sürülen makine dilindeki komutların kodunun çözülmesi ve işlemci içerisinde her bir komutun doğru bir biçimde ele alınarak işlenmesinden sorumludur. Eğer komutun işlenmesi sırasında herhangi bir veriye gerek duyulursa ve veri genel amaçlı kaydedicilerden birindeyse alınıp getirilmesi, eğer veri harici ortamdaysa (bellek veya çevresel cihazlarda) BIU’dan bu verinin talep edilmesi gibi işlemleri EU gerçekleştirir.
İcra birimi komut kuyruğunun en üstündeki komut kodunu alıp getirdikten sonra, kodalr bir komut-kod çözücü vasıtasıyla, içerisinde komutların mikro karşılıkları olan (mikro-kod ROM) ve adına mikroprogram denilen bir mikro-kod sıralayıcısının kontrolü altında çözülerek ALU birimine sürülür.
Eğer kodu belirlenen kod bir aritmetik ya da mantık komutuysa, icra birimindeki adres üreteci vasıtasıyla BIU uyarılarak bellekten veri alıp getirilerek icra birimindeki kaydedicilere veya doğrudan ALU’ya yollar ve kontrol biriminin denetiminde bu veriyle ne yapılması gerekiyorsa o yapılır.
Komutlar işlendikten sonra sonuç bilgisi nereye depolanacaksa (bir kaydediciye veya bellek alanına) oraya gönderilir. Bir komutun işlenmesinden sonra komut kuyruğunda bulunan sıradaki komutun ele alınması için kontrol birimi sinyal gönderir.
İlk mikroişlemcilerde bir komutun işlenmesi üç aşamada yapılmaktaydı.
1. Komut kodunun bellekten alınıp getirilmesi
2. Kodunun çözülmesi
3. İşlenmesi
Bir komut kodu üç aşamalı iş hattına girerek belli saat çevrimlerinde işlenmekteydi. Bu teknikte iş hattına giren bir komut icra edilmeden ikinci bir komut hatta alınmıyordu. Bir komut bir kademede işlendikten sonra diğer kademeye geçtiğinde önceki kademe boş duruyordu ve böylece işlemci çevrimleri boşa harcanıyordu. Bu tip çalışma sistemine tek kademeli iş-hattı tekniği denmektedir.
Daha sonraları mikroişlemci mimarisindeki gelişimlerle (32 bit işlemciler) iş hattına alınan bir komut bir sonraki safhaya geçtiğinde boşalan safhaya başka bir komut alınmaktadır. Böylece her saat çevriminde iş hattındaki tüm kademeler bir iş ile meşgul olmakta ve toplamda birden çok işlem yapılmaktadır. Bu tip işlemci çalışma sistemine süper iş hatlı teknik denmektedir.
Kısaca iş hattı tekniği, mikroişlemcinin farklı kaynaklar kullanarak komutları ardışık adımlara bölmesi işlemine denir. Bundan dolayı işlemci bir çok işlemi paralel olarak aynı anda yapar.
Mikroişlemcinin her defasında komut alıp getirmesi ve onu işlemesi sistemi yavaşlatır. Bu yavaşlığı gidermek için iş hattı tekniği yeterlidir. Fakat tekrar belleğe erişilmek istendiğinde bu defada belleğin işlemci hızında olmaması ve ona gerektiği hızda cevap vermemesi işlemci tasarımcısına bir sorun daha ortaya çıkarmıştır.
Burada verinin akışını hızlandıran ve sistemin bir bütün halinde aynı hızda çalışmasını sağlayan bir dizi tedbirler alınmıştır.
Günümüz işlemcilerinde bu tip sorunlar Dinamik Çalışma adı altında işlemciye kazandırılan yeteneklerle yok edilmeye çalışılmıştır. Dinamik çalışmaya dahil olan öğeler şunlardır:
•Mikroişlemcinin bir sonraki komutla birlikte ele alacağı komut gurubunun tahmin edilmesi işlemine Çoklu Dallanma Tahmini denir.
•Komutlar arasındaki bağımlılıkları analiz eden bir veri akış analizi ve
•İlk iki öğenin sonuçlarını kullanarak komutları spekülatif çalıştırma işlemidir.
Sistemdeki elemanların hızlarının birbirine yakın olmasının yanında ön bellekler ve süper skalar mimarisi hızda önemli rol oynamaktadır.
Aritmetik ve Mantık Birimi (ALU)
İcra birimindeki komutun kodu çözüldükten sonra yapılacak işlem aritmetik ya da mantık işlemi olacaktır. Bu işlemin yürütülmesi işi ALU (Arithmetic and Logic Unit) birimine verilmiştir. Bu birimde bayt veya word olarak basit dört işlemin yanında verinin bit olarak artırılması ya da azaltılması, sağa sola kaydırılması veya yönlendirilmesi işlemleri yapılabilir. Aynı zamanda ALU bayt veya word verisi üzerinde bit-bit mantıksal işlemlerin yapılması için de çok elverişlidir. AND,OR ve XOR komutlarıyla, iki bayt veya iki word verisi arasında bit eşlemesi işlemleri yapılabilir.
İlk mikroişlemcilerde çarpma bölme gibi aritmetik komutların yerine getirilmesinde sağa veya sola kaydırma komutlarından faydalanılmaktaydı, fakat 16 bitlik işlemcilerle birlikte mimarinin gelişmesine paralel olarak komut kümelerindeki artış, bu işlemleri doğrudan yapabilecek MUL ve DIV gibi komutları da beraberinde getirmiştir. Hangi komut kullanılırsa kullanılsın toplayıcı ve çıkarıcı devreleri çarpma ve bölme işlemlerinde çarpma için üstüste toplama, bölme için üstüste çıkarma şeklinde kullanılmaktadır
ALU gerekli işlemi bitirdikten sonra adına bayrak kaydedicisi denilen hücreye yazılacak durum bitlerini kontrol eder. Bu bitler bir sonraki işlenecek komuta etki edebilir. Mikroişlemci tüm bu işlemlerin düzenli bir şekilde yürütülebilmesi için veri yolu bağdaştırma birimi ile icra biriminin paralel olarak çalışması gerekir. Herhangi bir kopuklukta makine kilitlenebilir
Mikroişlemcilerde çekirdek yapıları
Aşağıda tek çekirdekli ve çok çekirdekli işlemcilerin yapısını görüyoruz. Çok çekirdekli işlemciler eş zamanlı olarak birden fazla işlemi yürütebildiği için ALU ve Kaydedicileri çekirdek sayılarıyla doğru orantılıdır. ALU aritmetik işlemleri yürüten temel birimdi

Kaydediciler
İşlemci içerisinde çeşitli verilerin manevrasında kullanılmak üzere özel amaçlı 14 kaydedici vardır. Bu kaydediciler fonksiyonlarına göre dört gruba ayrılırlar: Bunlardan
4 tanesi segment kaydedicisi
3 tanesi işaret kaydedicisi
2 tanesi indis kaydedicisi
5 tanesi genel amaçlı kaydedicilerdir.
Bunlardan başka bir de bayrak kaydedicisi mevcuttur.
Segment Kaydediciler
Büyük kapasiteli belleklerde bilginin yönetimi (yüklenmesi, saklanması ve sırasını beklemesi) oldukça karmaşıktır. Bu sebeple büyük bellekler belli amaçlarla 64Kbaytlık küçük gruplara (segmentlere) ayrılarak daha kolay yönetilirler. Bellekte bu bölümlerin başlangıç adresi segment kaydedicileri tarafından tutulurlar. Bu bölümdeki verilerin adresleri ise, segment kaydedici içeriğine uzaklığıdır ve ofset adres olarak anılırlar.
Gösterdikleri bellek alanlarının oluşumuna göre segment adları özel amaçları olarak verilmiştir. Buna göre programcı tarafından yazılan komut kodlarının assemblera bağlı olarak sistem tarafından bellekte saklandığı bölüme kod segment adı verilir.
Kod segmentteki komutlarla ilgili olan veya bu kodların işleyeceği verilerin saklandığı başka bir bölüme data segmenti denilir. Verilerin çok büyük olduğu istatistiksel bilgilerin tutulduğu data segmentinin yetmediği durumlarda ikinci bir bölüm vardır ki buna ekstra segment adı verilir. Networking ve korumalı mod işlemlerinde bu data segmentlerinin büyüklüğü de yetmezse, 386 ve daha sonraki işlemcilerde F segment ve G segment denilen bölümler taanımlanmıştır. Bunun anlamı bellek miktarının mikroişlemci mimarisi ile birlikte paralel olarak artması demektir.
Mikroişlemcilerde komutların işlenmesi sırasında , kaydedicilerin yetersiz gelmesi durumunda verinin geçici olarak bellekte atıldığı özel bölüme Yığın Segmenti denilir.
Bellekteki bu bölümlerin başlangıç adresi kendi adlarıyla işlemci içerisinde yer alan kaydedicilerde tutulur.
Kod segment kaydedicisi: Kod segment bellekte çalıştırılacak komutların sıralı bir şekilde bulunduğu bölümdür.
Data Segment Kaydedicisi: Normalde işlenecek verinin depolandığı bellek alanının başlangıç adresini gösterir. Diğer segment kaydedicileri gibi tam adresin segment tarafını gösterir.
Ekstra segment kaydedicisi: ES olarak adlandırılan bu kaydedici, programcı tarafından tanımlanmadıkça işlemci bunu kullanmaz. Genellikle string işlemlerinde hedef adresi olarak algılanır.
Yığın Segment Kaydedicisi: Kısaca SS olarak bilinen bu kaydedicinin gösterdiği bellek alanına verilen ad adından da anlaşılabileceği gibi bir takım veri işlenirken yer yokluğundan veya kaydedici yetersizliğinden dolayı verinin geçici olarak yerleştirildiği yerdir. Yığına veriler geçici olarak atılabildiği gibi, program içerisinde altyordam çağrılmasında veya diğer yüksek düzeyli dillere parametre geçişleri yapılmasında çok sık kullanılmaktadır.
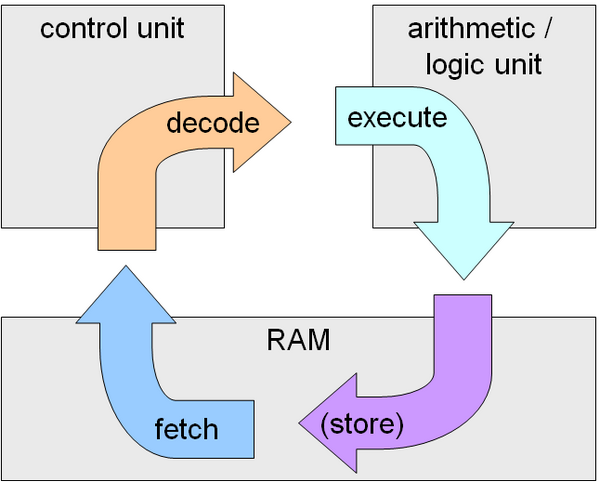
Mikroişlemcilerin komut işleme mantığı
Bir mikroişlemcinin komut işleme döngüsü aşağıdaki gibidir. İlk olarak bellekten veri fetch edilir. Kontrol birimi komutu decode eder ve aritmetik işlem birimine devreder. ALU’da komut çalıştırılarak işletilir ve tekrar belleğe yazılır
Çekirdek Bellek
Eski teknoloji işlemcilerde yarı iletken bellek yerine çekirdek bellek teknolojisi kullanılırdı. Besleme geriliminin kesilmesi durumda bile içerdiği bilgiyi kaybetmeyen bu bellek tipinin büyük hacimli , yavaş ve pahalı olmasından dolayı yarı iletken bellek teknolojisine geçilmiştir
Yarı İletken Bellekler
Yarı iletken bellekler 4 çeşittir
- RAM (yaz-oku)
- ROM (sadece-oku)
- PROM (programlanabilen ROM)
- EPROM (siline bilen PROM)
Mikroişlemcinin Görevleri
•Sistemdeki tüm elemanlar ve birimlere zamanlama ve kontrol sinyali sağlar.
•Bellekten komut alıp getirir.
•Komutun kodunu çözer.
•Komutun operandına göre, veriyi kendisine veya G/Ç birimine aktarır.
•Aritmetik ve mantık işlemlerini yürütür.
•Program işlenirken, diğer donanım birimlerinden gelen kesme taleplerine cevap verir.